Outstanding Tips About How To Build A Wall Climbing Robot

Wall-climbing Robot | Mit Technology Review

How To Make A Climbing Robot - Youtube

How To Make A Wheg Climbing Robot At Home - Youtube
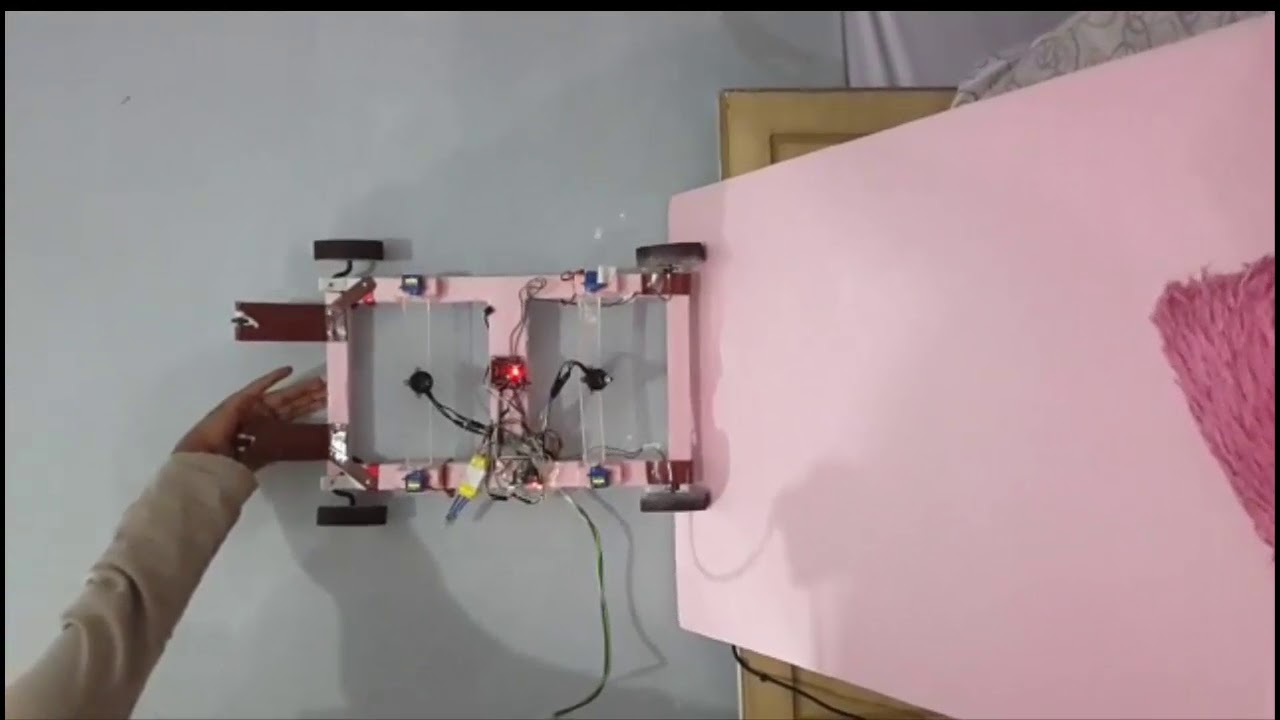
Diy Wall Climbing Robot -wall Car - Youtube

Pdf) Wall Climbing Robot: Mechanical Design And Implementation

Wall Climbing Robot Car Using Arduino, Bluetooth & Android App
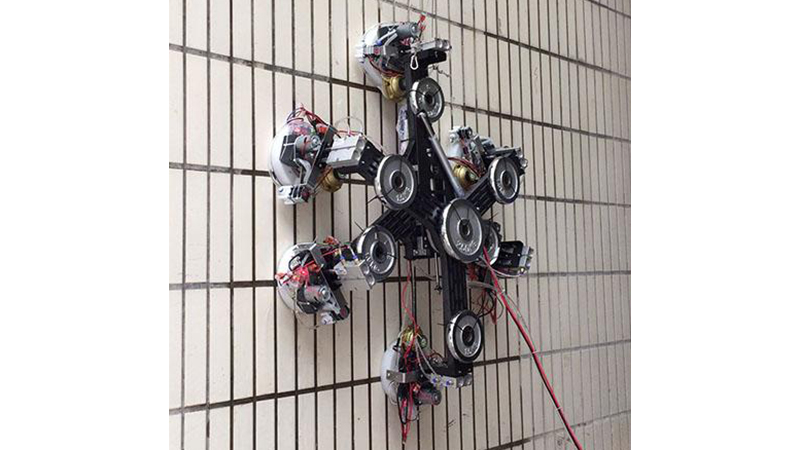
Adhesion is what is required primarily, to help keep the robot firmly on to the wall.
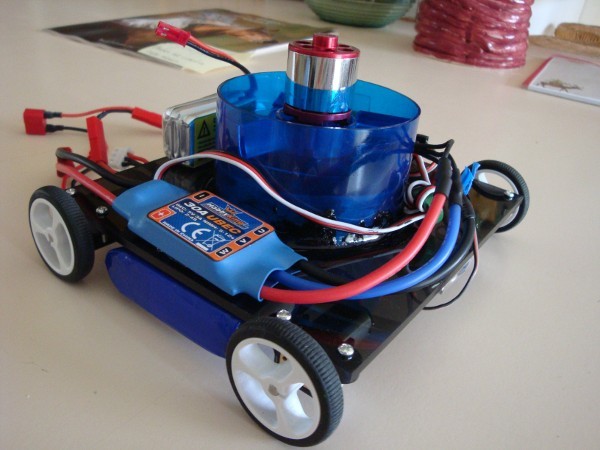
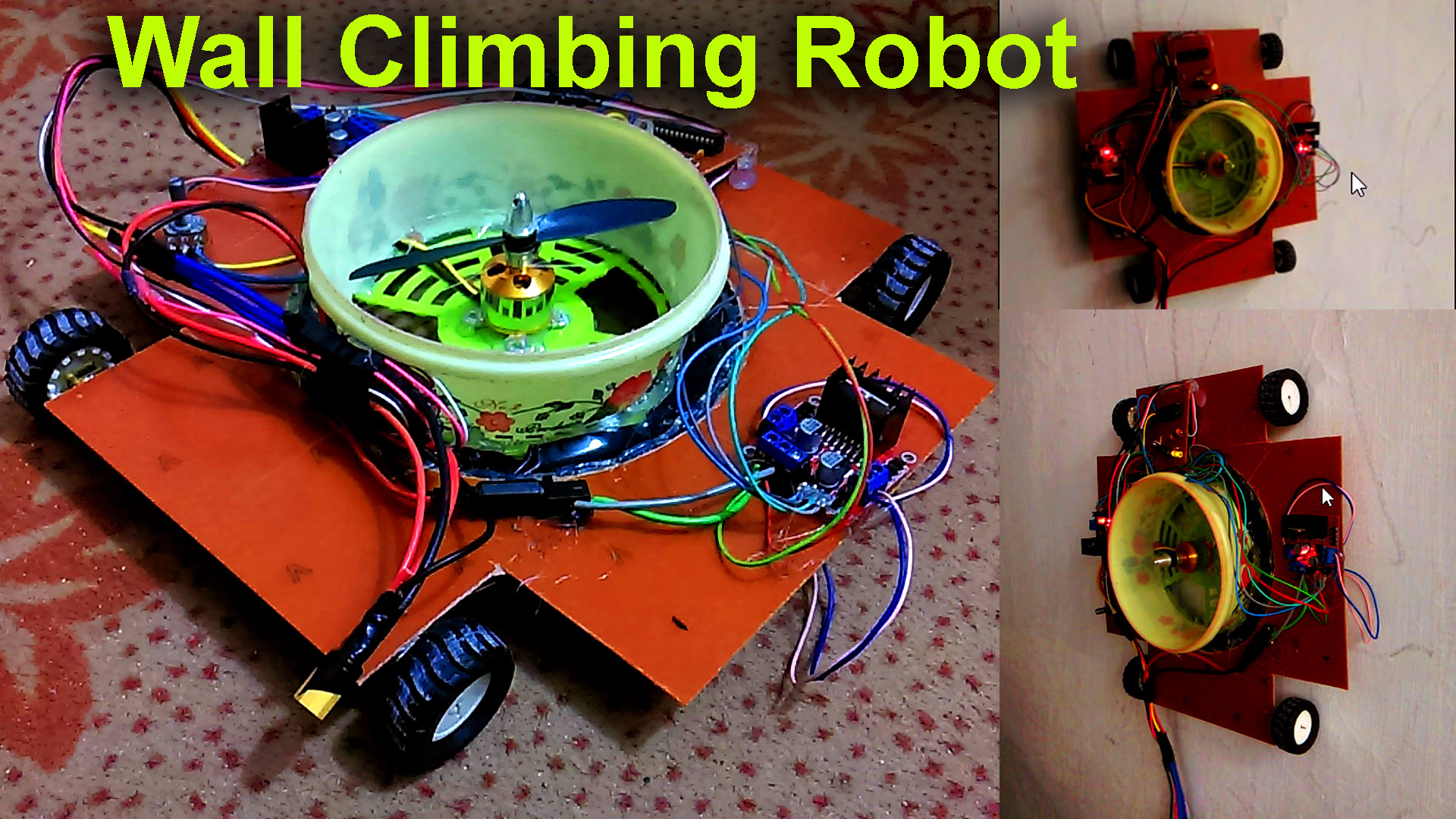
How to build a wall climbing robot. There are three major systems needed for designing a wall climbing robot: Zhang wants to take advantage of wall space—even. Reliable adhesion is a major factor in developing a wcr.
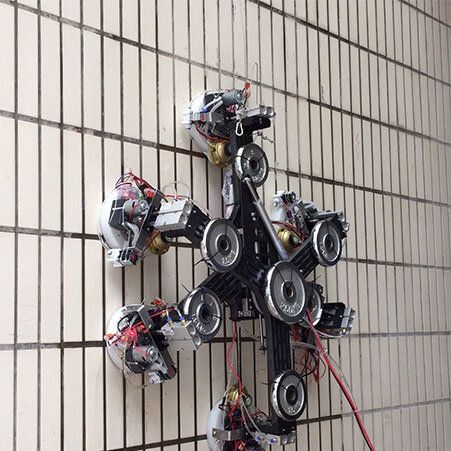
1)a vacuum generated by a high speed fan/exhaust: 3) the four wheels were custom cnc machined. This can be done by approximating the payload and.
With space at a premium, mengni zhang, a ph.d. Then, the micromotors move the robot toward the next step. Student at cornell’s architectural robotics lab, looked beyond floor space.
Subscribe for more tech & culture videos: Now design secondary walls (or. Making and working explanation🕘 :
The robot climbs each step using the rotating arm and the micromotors. How do you build a. For any walls steeper than 20° or 30°, plan to have a short, vertical kicker panel at the bottom to provide ample room for your feet at the start of problems.
2) rubberband was used as belt tensioner. Suction devices that can reportedly grip on to a wide variety of textures could lead to a new generation of climbing robots and gripping robot arms. The kind of wall you build largely depends on the space you have available.
That is, the rotating arm lifts the robot. 1) the wheels on each side were linked together by a timing belt, for tank style driving.
Wall-climbing Robot | Suction Cups

Thames & Kosmos Geckobot Wall Climbing Robot + Free Shipping
Wall-climbing Robots Use New Trick To Defy Gravity

Wall Climbing Robot : 9 Steps - Instructables

Geco - Wall Climbing Robot : 9 Steps (with Pictures) Instructables

Wall-climbing Robots Build New Structures From Carbon Fibre

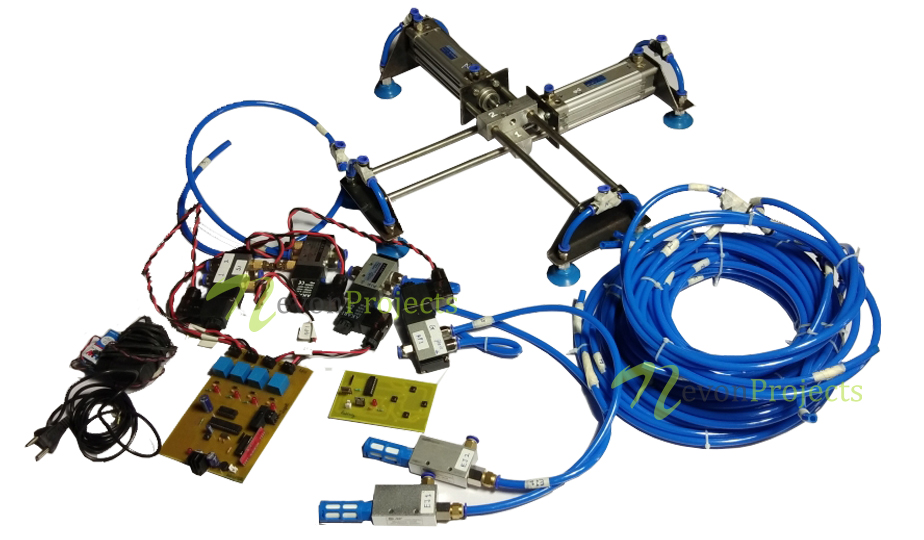
Diy Air Powered Mini Wall Climber Robot Mechanical Pneumatics Project - Youtube
Wall-climbing Robots! - Share Your Projects Pololu Forum
Wall Climbing Robot Car Using Arduino, Bluetooth & Android App
Pneumatic Powered Wall Climbing Robot

Design And Fabrication Of Vertically Wall Climbing Glass Cleaning Robot

How To Make A Wall Climbing Robot - Youtube

Geco - Wall Climbing Robot : 9 Steps (with Pictures) Instructables
